Lego Technic MOC - [TC19] Electric scooter

This project was started off by the TC 19 contest in the Eurobricks forum. I had never built a motorcycle before, so I did not want to try and build something based on an existing motorcycle. Many could probably do that better than I could, and I did not think that I could replicate an existing model well. Therefore, I decided to build something without a plan, scale etc... I started off with two basic ideas: I wanted to have something other than the classic front fork and I wanted to have to have a futuristic look, maybe streamlining.
I started off with the front fork. I wanted to have a sleek looking frame around the wheels. My idea was to have the sides of the fork travel back and forth to steer. I was just experimenting with how the fork could come from the sides of the wheel. Of course, this restricts the possible turning angle of the wheel. After some iteration, I came up with the following solution: The supports that hold the front wheel can slide back and forth slightly using a pivot in the chassis. This solved the small turning angle of the front wheel, and I quite liked this solution.

I put together a very basic lower chassis together with this front wheel. I had the drive to the rear wheel gear driven, but I did not yet know how I would forward this inside the chassis.

At this point, I was wondering if I could also incorporate front suspension into this otherwise simple build. I added a pivot between the front section and the chassis, and tried both the front and rear shock springs horizontal. This gave me the idea to have height adjustable suspension. The springs meet the 3l thin liftarms which are on opposing gears. I wanted to then have a worm gear which would adjust the height of the suspension. I also started on some bodywork.

Unfortunately, I could not figure out a way to package this. Neither could I find a way to place the worm gear for the ride height, but also it was impossible to transmit the power from the rear wheel into the chassis with this configuration. With the goal of getting something finished before the end of the contest, I settled on having only rear suspension and tried to move forward. I pushed forward to complete the bodywork, but it did not work out so well.

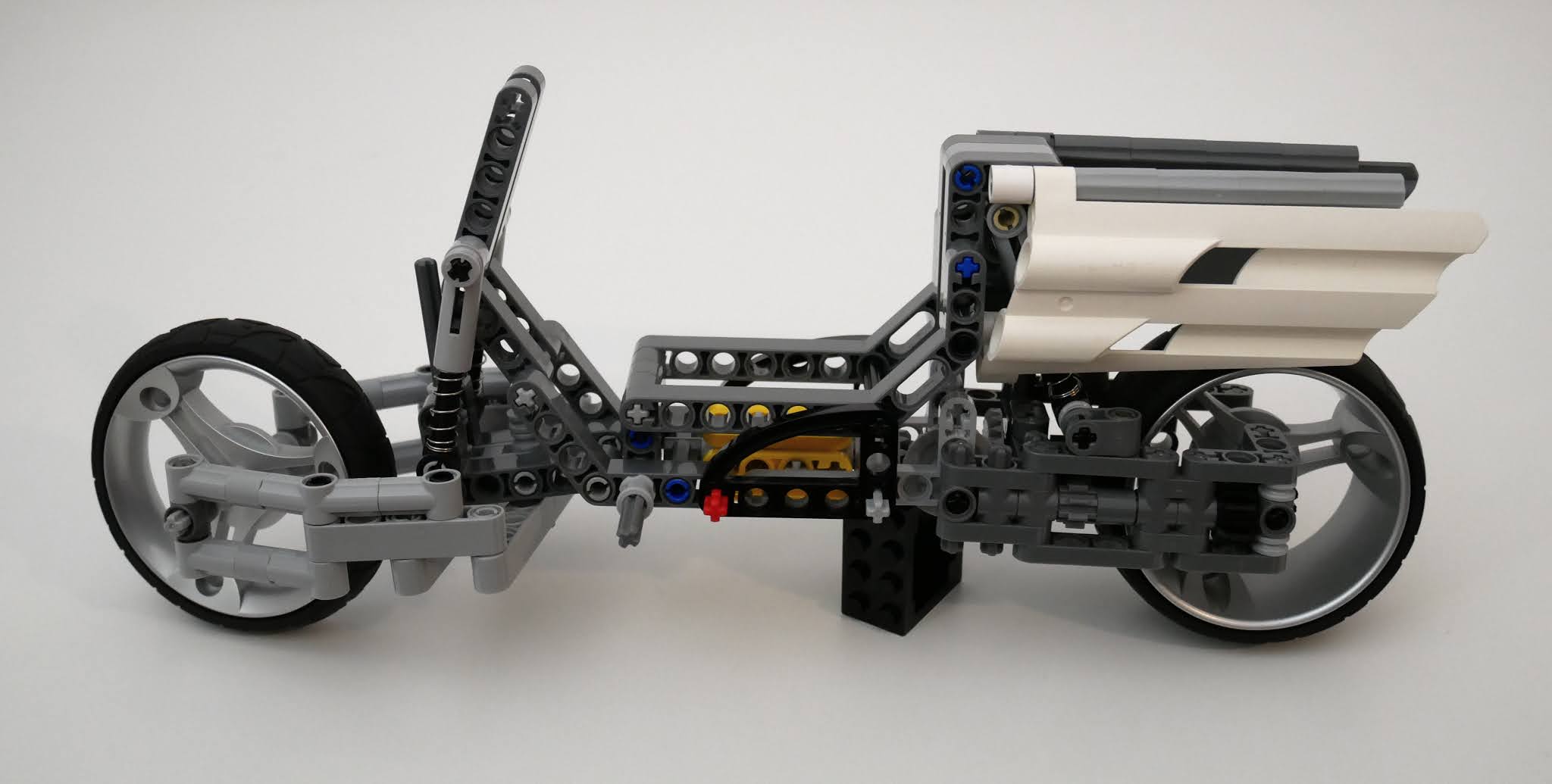
Obviously, this was far too low and long, with completely wrong proportions. Working without a blueprint is flexible, but it does make getting the proportions more difficult, as I was quickly learning... My next iteration was still not pretty, but a bit more successful.


I thought that the wheels from the set 8417 would be suitable for a futuristic scooter. Also, they were not as large as some of the other motorcycle wheels, which I preferred.


It still did not seem like I could package everything in. Again, I could not find a good place for the worm gear for the ride height. Also, the spring for the front suspension would interfere with how I wanted to bring the steering linkage up. I think it would have been possible if I went for a look having a lot of mechanicals outside. In that case, maybe the spring could be on the outside edge, leaving space for a motor in the middle. In the end, I decided to abandon the ride height adjustment. I may come back to it for another build in the future, but for now, I decided to go without it.
Next, I built the arm for the rear wheel, including the gear driven drivetrain. As this is a small scooter, I decided to have just a simple transmission without multiple gears. I would have loved to have a small piston engine, but it just did not seem to be suitable for a scooter these days. That's why I decided to go with an "electric motor", with yellow accents. I had to revise this part several times to have gearing down from the motor to the wheel, so that the motor runs faster when the bike is driven.


The next step was bodywork, so I tried out some bodywork with some older panels.



Next, I will try to complete the bodywork at the front, and add some stiffening to the transition from the middle to the front.
I feel like the white fairing #4 looks really fitting for a futuristic scooter. Unfortunately, I have only this single one, not a matching pair... At the front, I think I need to continue the panels up a bit more, will experiment to see how it could be done.
After several more iterations at the front, and looking at pictures of a few scooters, I came up with this:

I think that this looks a lot better than before, and also much more conventional. The orange middle section is there to try it out, I'm not sure that I will keep it.
Next, I rebuilt the center section of the chassis to be more structurally sound, keeping the geometry the same.


After this, there were only a couple of things left: I finished the back of the seat, and added turn signals at the back. I also added a stand and a removable battery, and this project was done. In the end, the scooter turned out to be nice but not very futuristic, so I'm naming it the Electric Scooter. Nevertheless, I was pretty happy with how it came out, especially considering that this was the first two wheeler that I had built. The steering mechanism was one of my favorite parts, and integrating the drivetrain without a chain and too many visible gears was also quite nice.





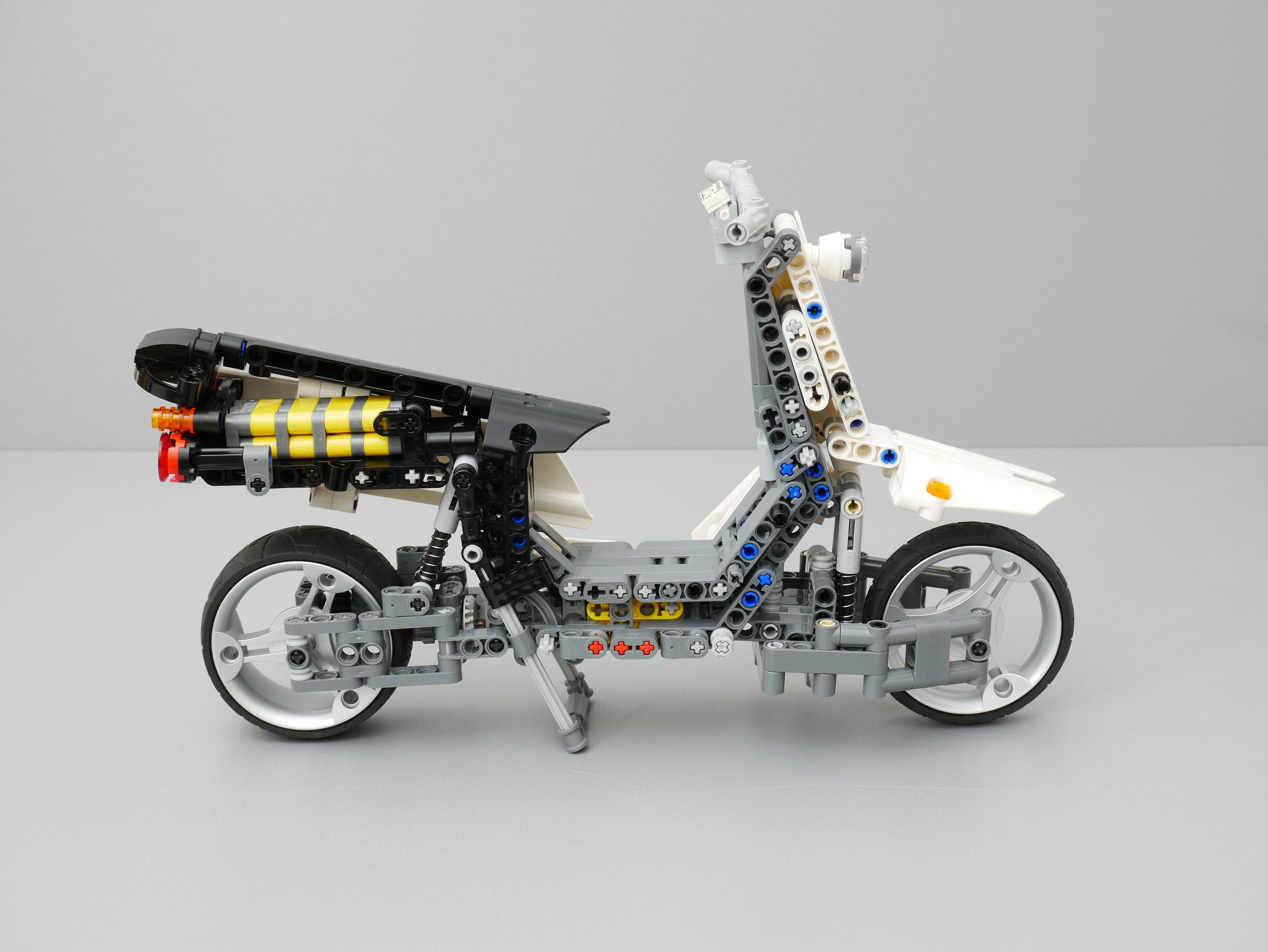
- Length: 30 cm
- Width: 10 cm
- Height: 19 cm
- Weight: 420 g
You can see a video of the model in action here:



Comments
Post a Comment